Ubtech Walker S2
Walker S2 is a humanoid robot developed by UBTECH, designed for smart service and home assistance. It features advanced bipedal walking, dexterous arm movements, and the ability to interact with people using voice and facial recognition. With improved balance and mobility, Walker S2 can perform complex tasks such as delivering items, opening doors, and even playing chess.

The World's First Humanoid Robot Capable of Autonomous Battery Swapping

"Overview of the Walker S2
{kind=link}
The World's First 3-minute Autonomous Battery Swapping, 24/7 Continuous Operation
{kind=link}

Real-time Battery Monitoring Management Intelligent Power Replenishment
The dual-battery switching design enables Walker S2 to switch between dual-battery and single-battery working mode. By integrating the real-time battery monitoring management with battery swap stations, Walker S2 can autonomously choose battery swap or charge mode according to the task priorities, and acheive dynamic power management.

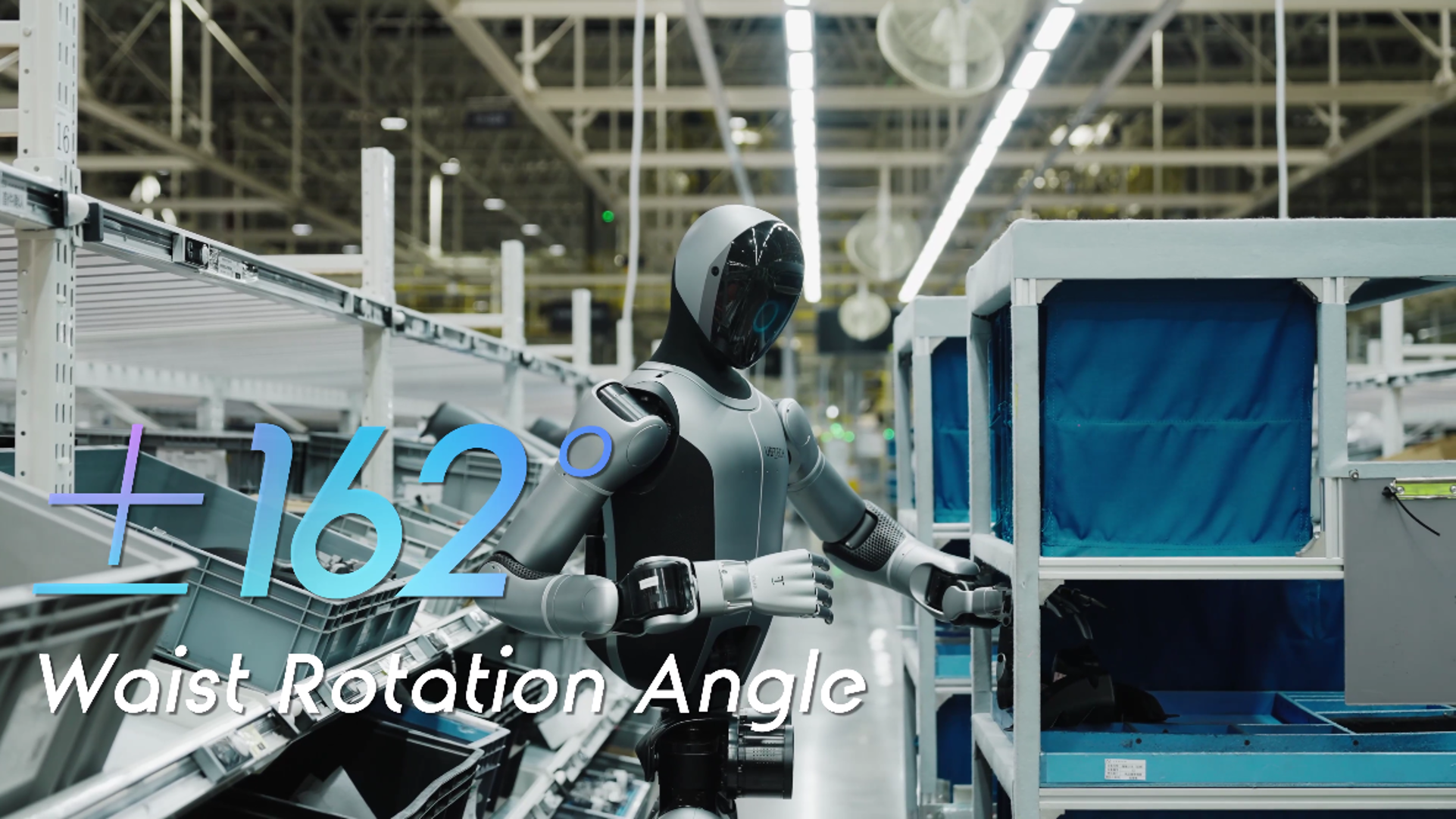
+- 162° Waist Rotation Angle
{kind=link}
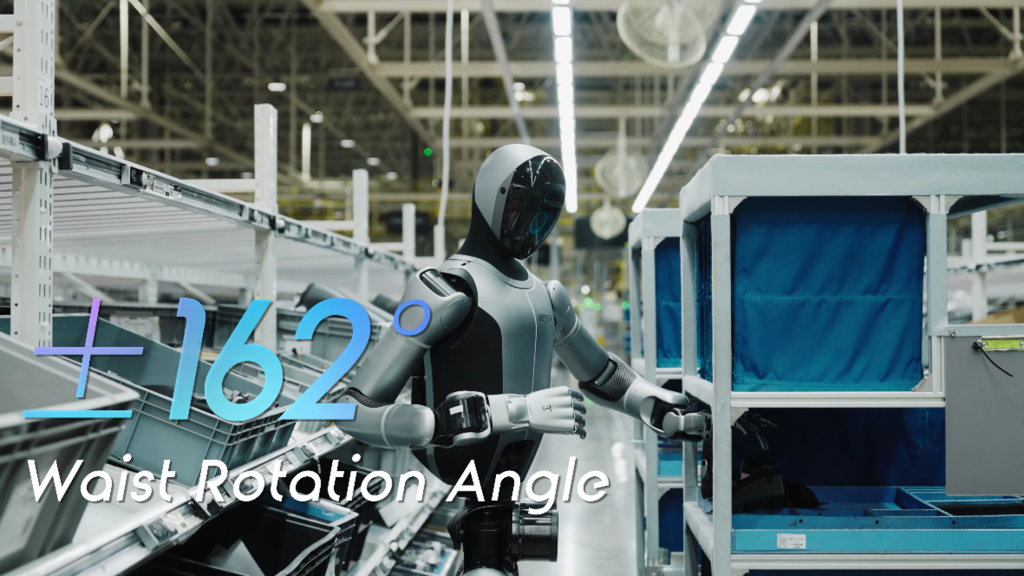
Deep Squat and Stoop Lifting
With the whole-body human-like dynamic balancing algorithm, Walker S2 can reach pitch 170° angle and handle 15kg payload within 0-1.8 meters workspace.

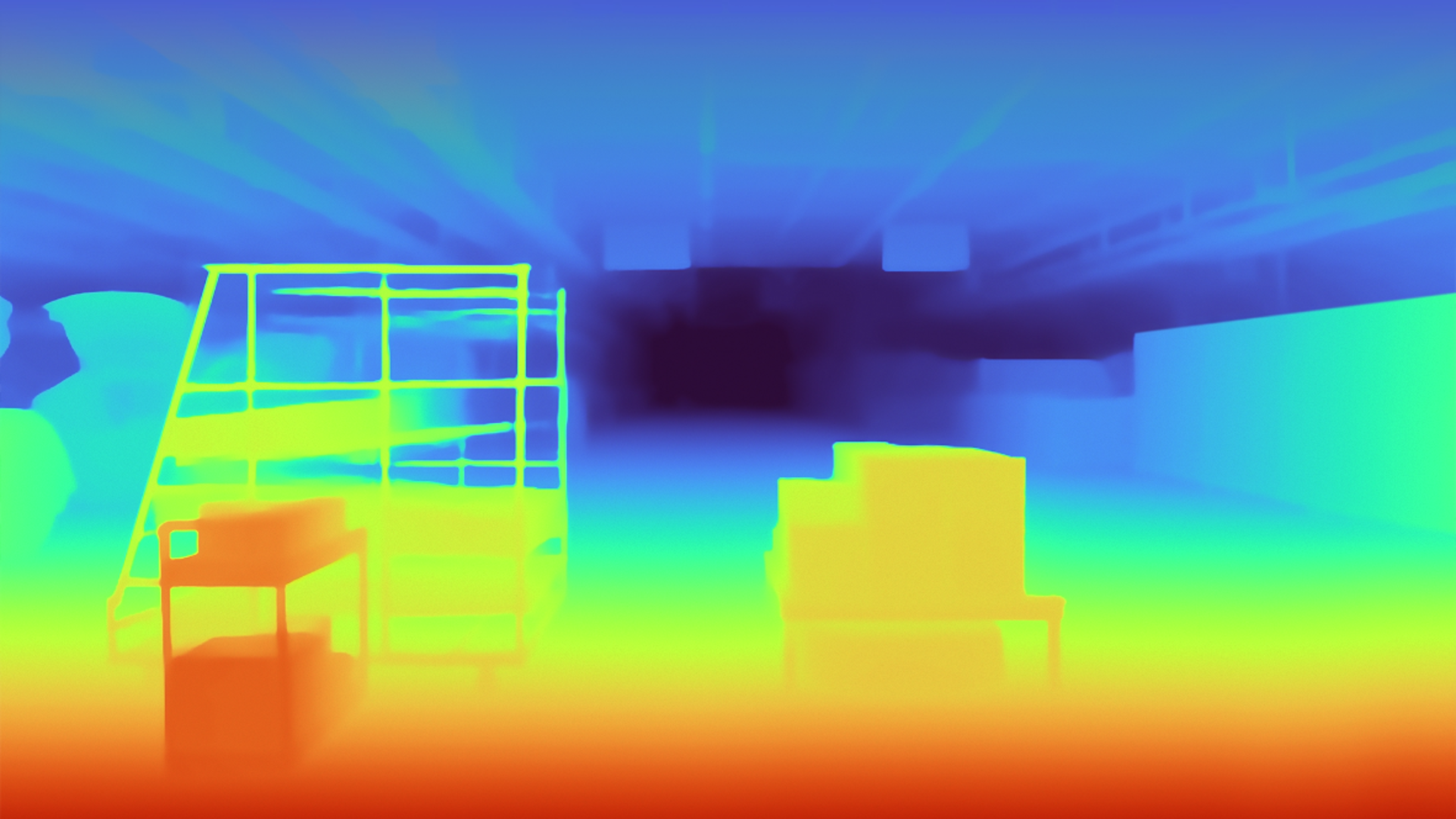
"Human-eye" Binocular Stereo Vision Perception
The pure RGB binocular stereo vision solution is built in Walker S2's head. The self-developed passive binocular vision system employs deep learning-based stereo depth estimation algorithms to generate high-precision, left-aligned dense depth maps in real-time. This enables Walker S2 to achieve "human-eye" stereoscopic perception capabilities.
{kind=link}
UBTECH's Self-developed Co-Agent; The World's First Industrial Agent for Humanoid Robot
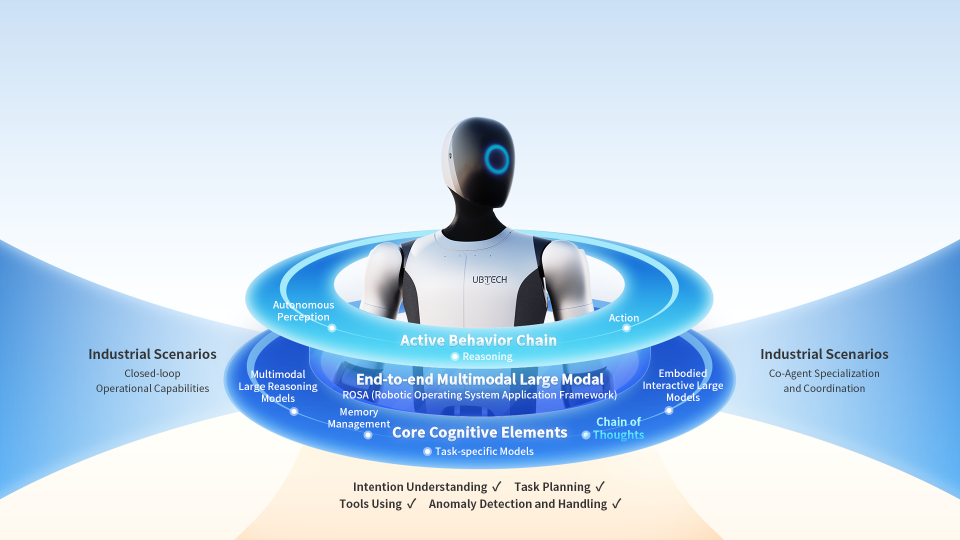
Production Line Task-Driven Swarm Intelligence for Humanoid Robots "BrainNet 2.0" + Co-Agents Building the Dual-Loop AI System
{kind=link}

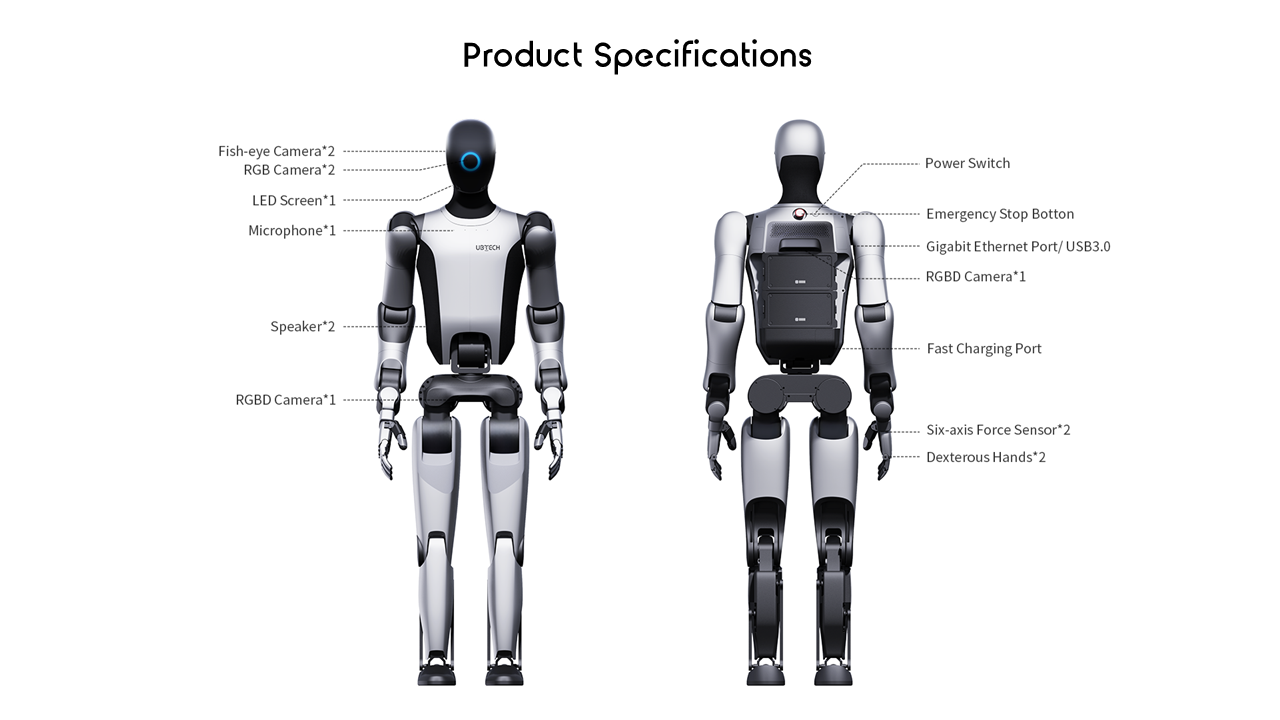
Product Specifications
{kind=link}
Hardware Specifications
Ubtech Cruzr S2
Ubtech Cruzr S2 is a “wheeled humanoid” robot — a humanoid upgrade with a mobile base platform, designed for industrial, logistics, and service environments where fast movement, precise manipulation, and safe interaction with both space and people are required. Cruzr S2 is an excellent solution when flexibility and mobility are needed — the robot can easily move between different areas of production, warehouses, or logistics without the need to adapt the infrastructure. It combines humanoid manipulation with robust transport capabilities, making it suitable for tasks that involve lifting, carrying, or sorting materials, as well as handling objects — tasks that traditional AGVs or transport robots struggle to perform. Its performance and robustness make it ideal for both supporting operations (material flow, internal storage, transport between zones) and work processes that require collaboration with humans.

UBTECH Full-sized Wheeled Humanoid Robot
Customized Services
Unlimited Possibilities
{kind=link}

Overview of the Cruzr S2
{kind=link}
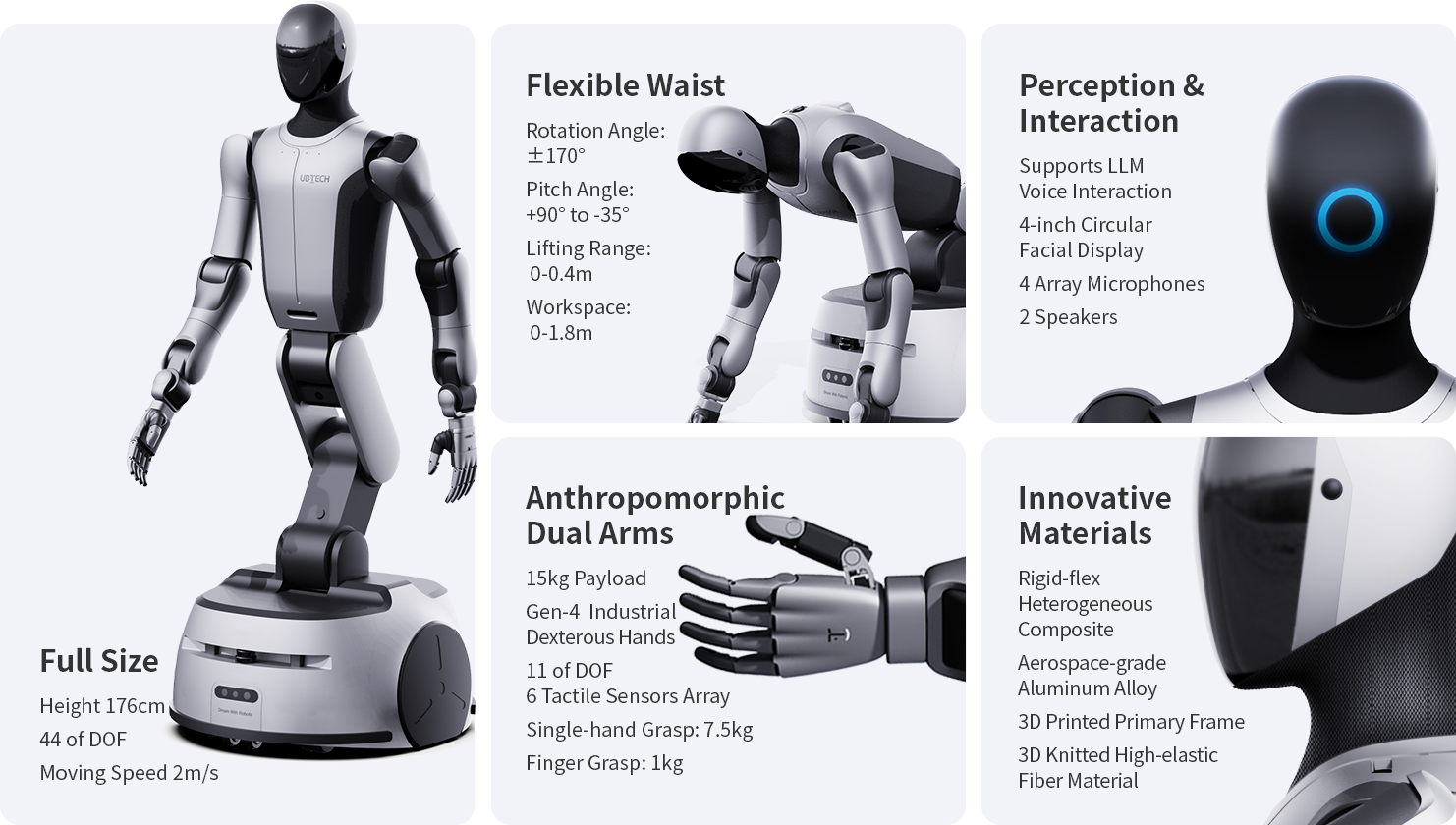
Human-like Dynamic Balancing; Full Spatial Range Handling
Featuring symmetrical body design with bidirectional bending function, Cruzr S2 can rotate ±170° angle within 0.8m passages. Its 0-40cm lifting range design enables Cruzr S2 to handle 15kg payload across 0-1.8m workspace.
{kind=link}

Dexterous Manipulation and Precise Operation
Powered by sim-to-real embodied intelligent data system, Cruzr S2 integrates gen-4 industrial dexterous hands, achieving sub-millimeter manipulation in sorting, component assembly and other multi-scenario grasping operations.
{kind=link}

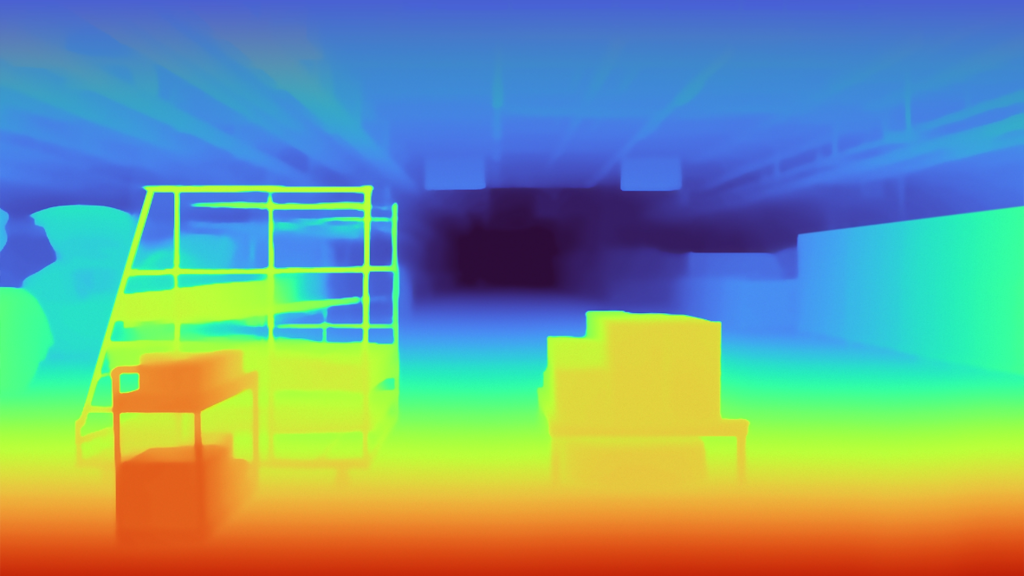
"Human-eye" Binocular Stereo Vision Perception
The pure RGB binocular stereo vision solution is built in Cruzr S2's head. The self-developed passive binocular vision system employs deep learning-based stereo depth estimation algorithms to generate high-precision, left-aligned dense depth maps in real-time. This enables Cruzr S2 to achieve "human-eye" stereoscopic perception capabilities.
{kind=link}

Complex Terrain Adaptability; Human-Robot Collabration Safety
With build-in learning-based motion control technology, Cruzr S2 is able to move with the speed of 2m/s and achieve self-balanced ability in complex terrain, ensuring human-robot collabration safety.
{kind=link}

UBTECH's Self-developed Co-Agent; The World's First Industrial Agent for Humanoid Robot
{kind=link}

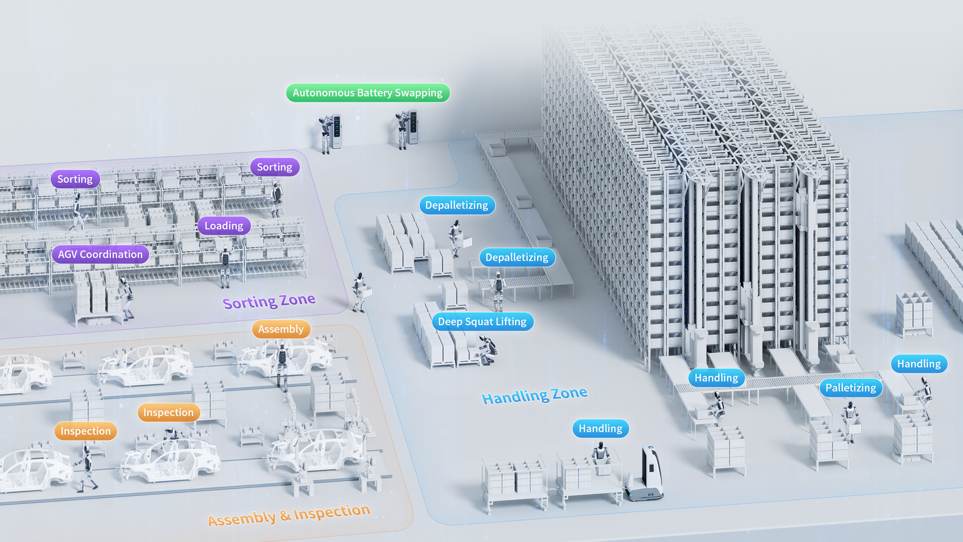
Application Scenarios
Meets multi-scenario operational demands, improves enterprise efficiency and acheives high-quality industrial development.
{kind=link}

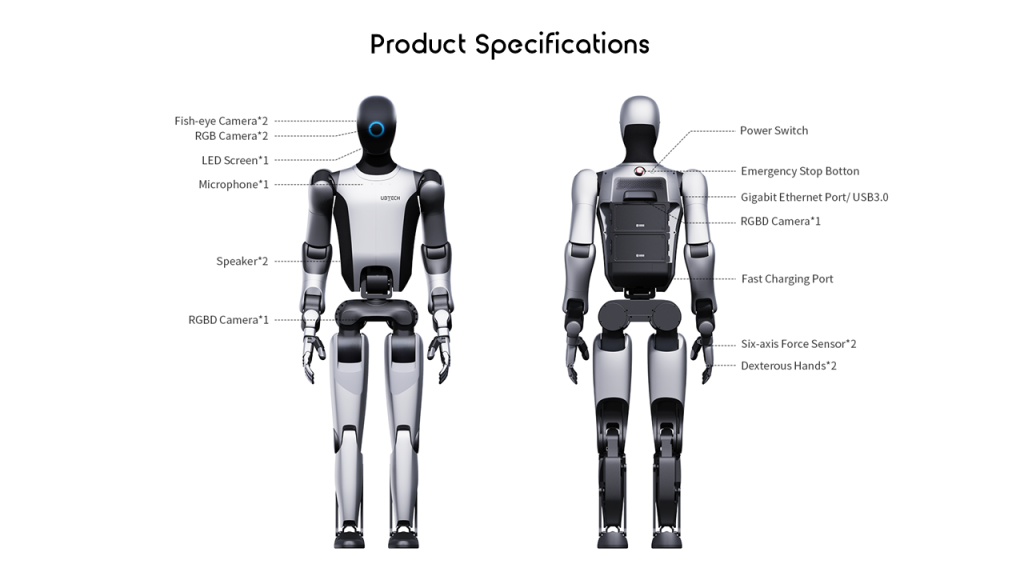
Product Specifications
{kind=link}
Walker Tienkung
Walker Tienkung is the latest humanoid robot of company Ubtech, unveiled as an advanced version of its predecessor with enhanced mobility and intelligence. It features smooth full-body coordination, flexible hand dexterity, and the ability to perform tasks like tai chi and other complex movements. Designed for real-world human interaction, Tienkung showcases UBTECH’s progress in AI, robotics, and human-robot collaboration.
A full-size, high-performance, research-grade humanoid robot for universities, research institutions, and developers. Open-source architecture supports scientific research and scenario-based innovation, driving technological advancement and practical applications.
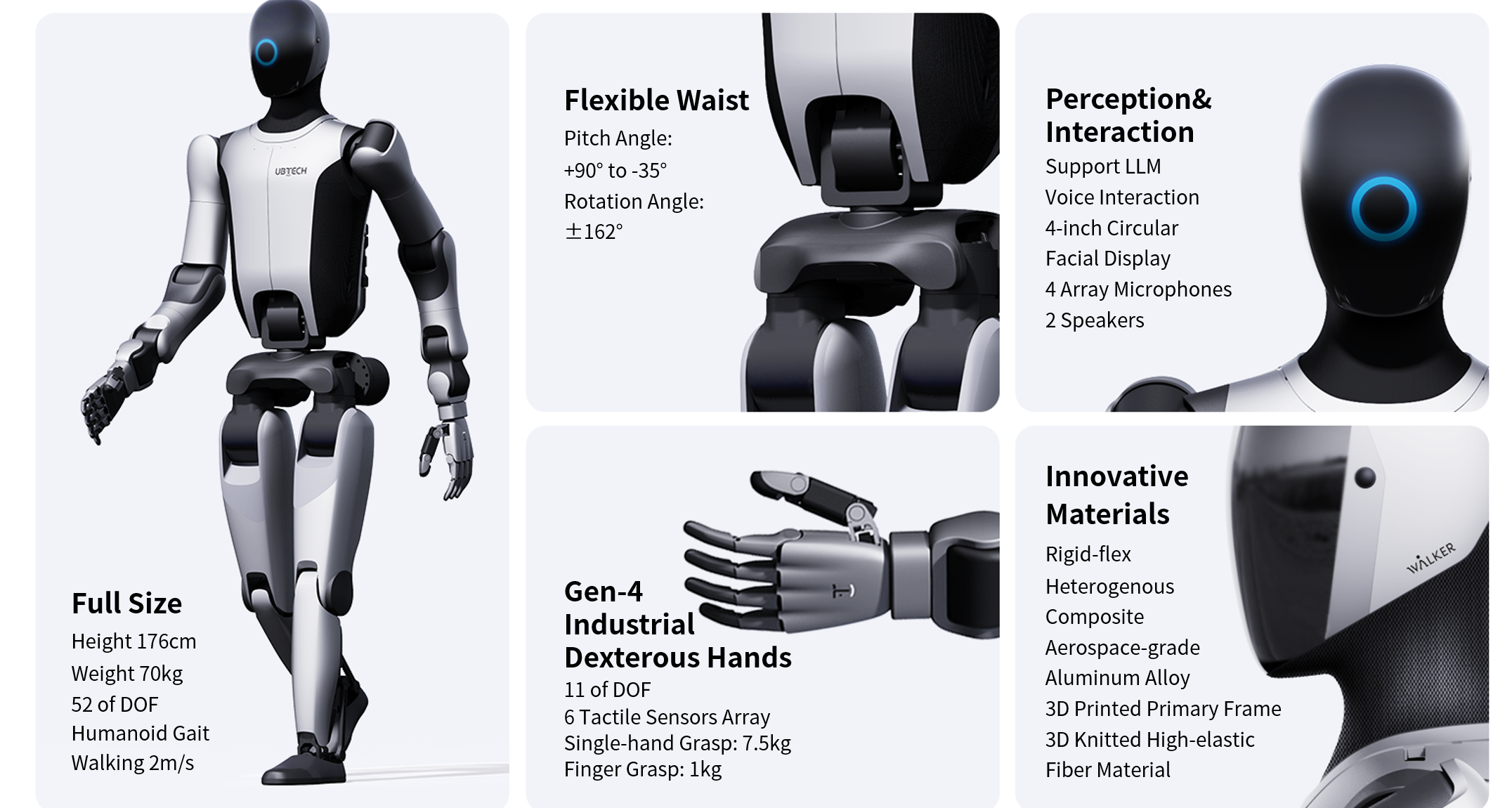
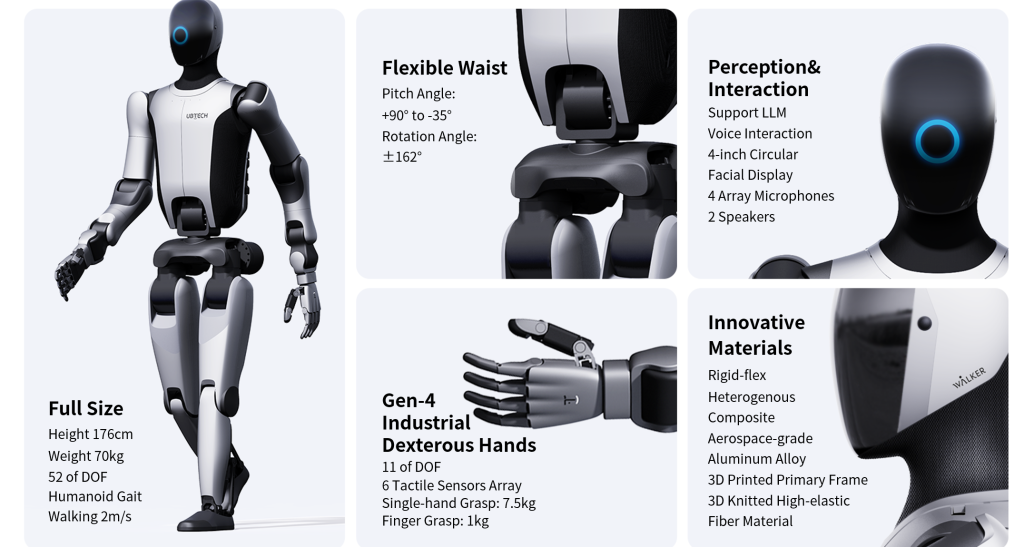
Walker Tienkung Humanoid robot parameters
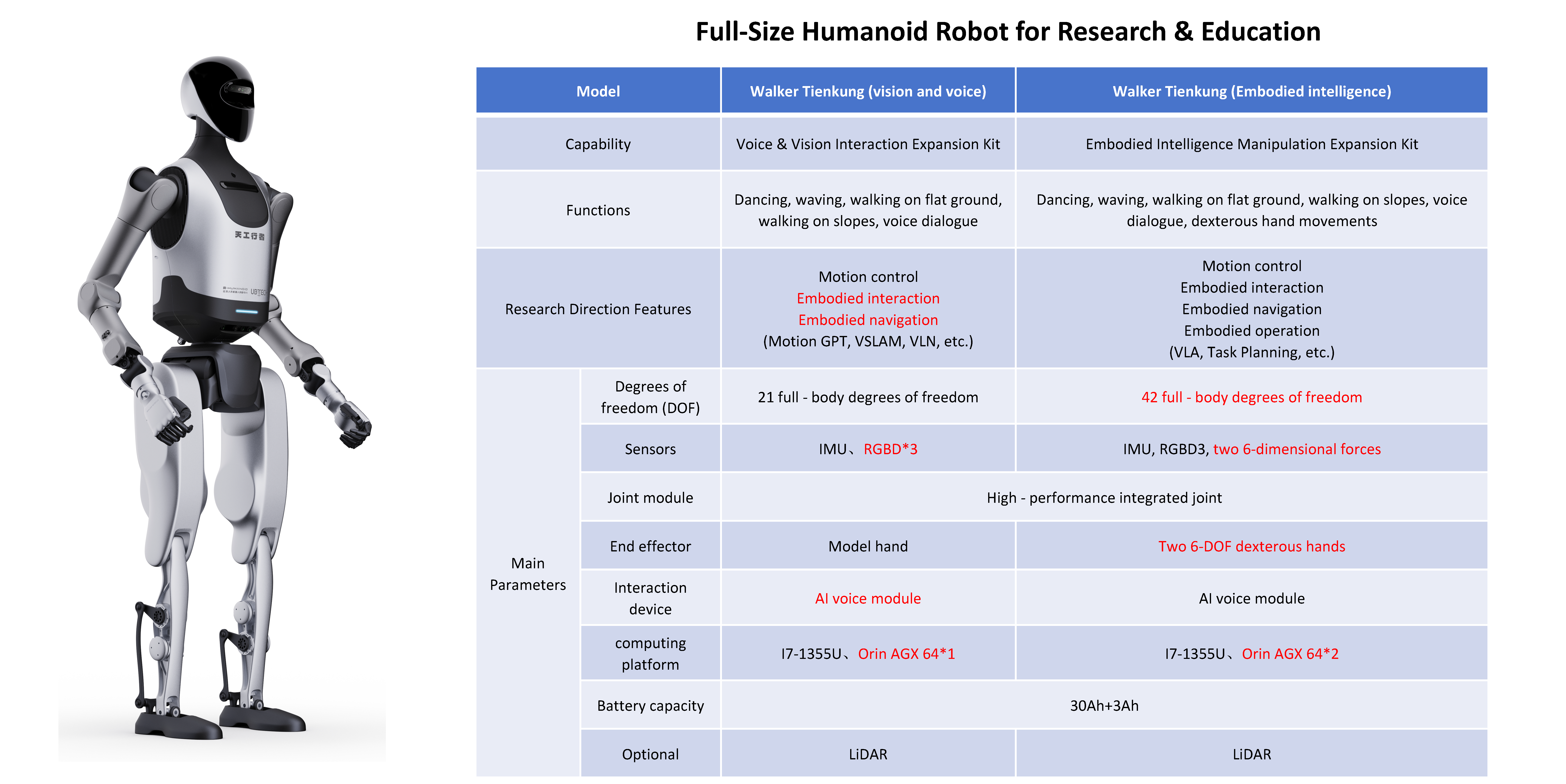{kind=link}
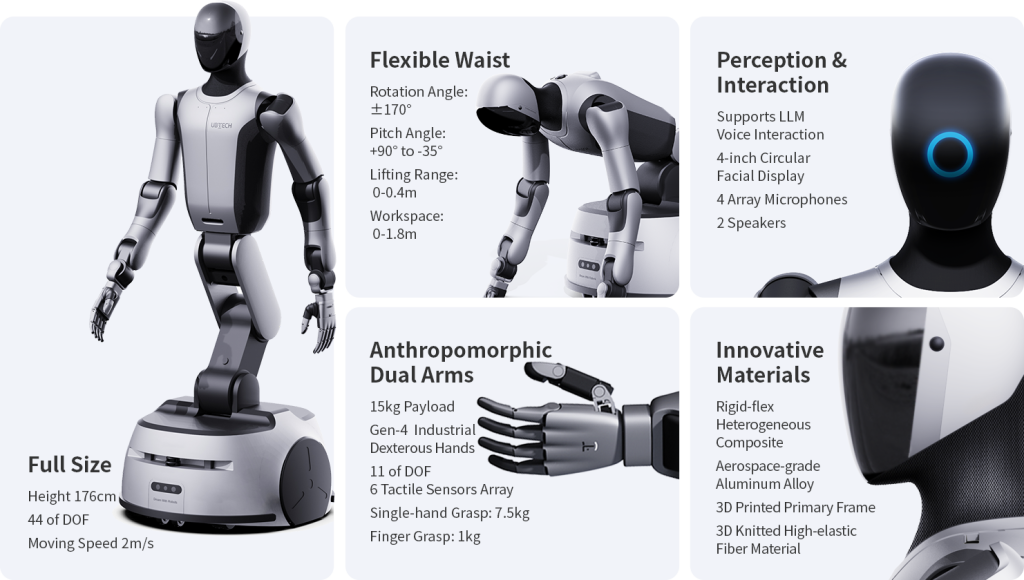
Core Advantages
{kind=link}
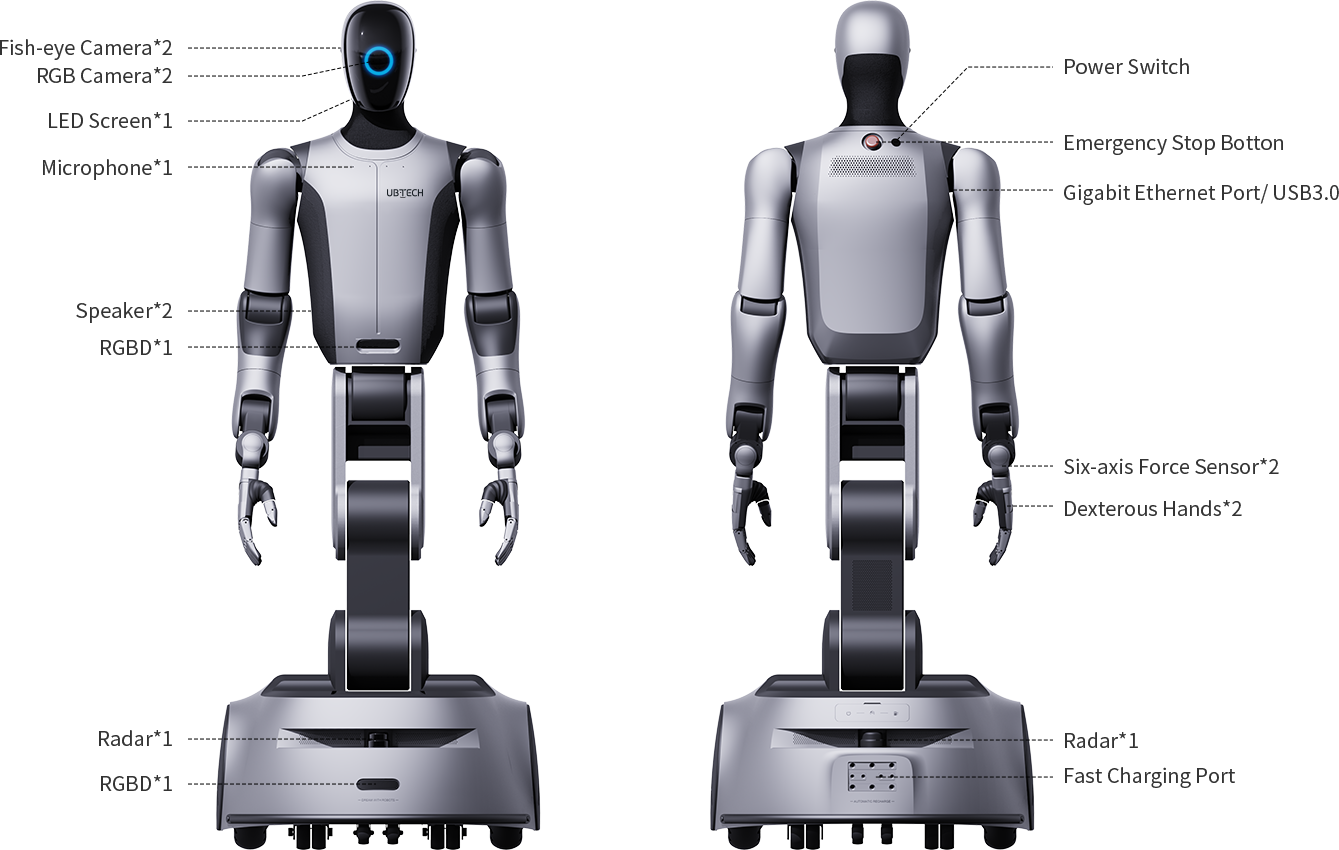
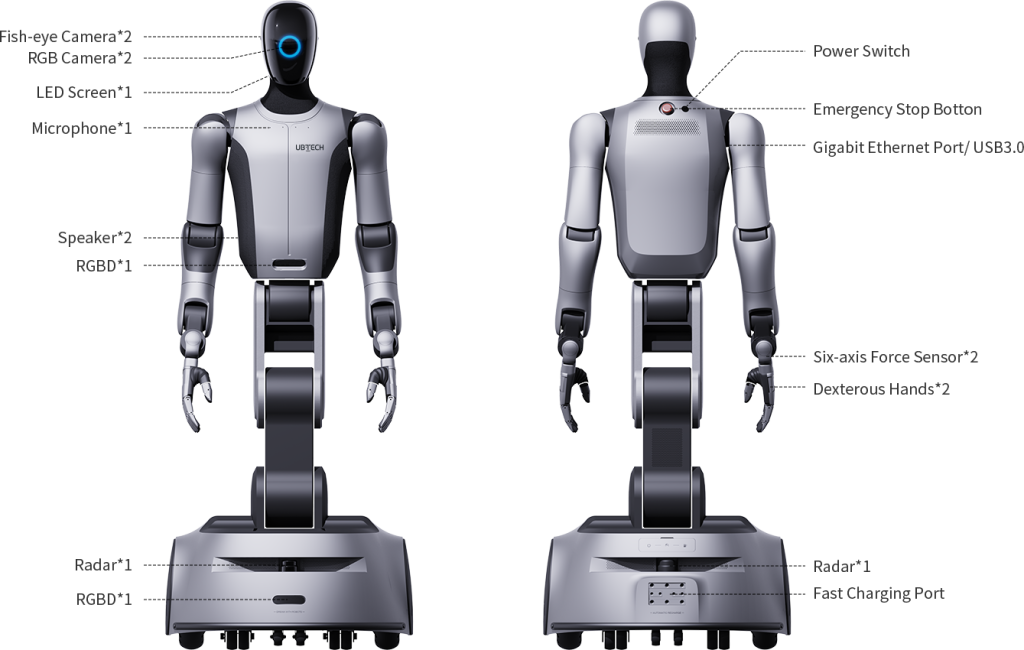
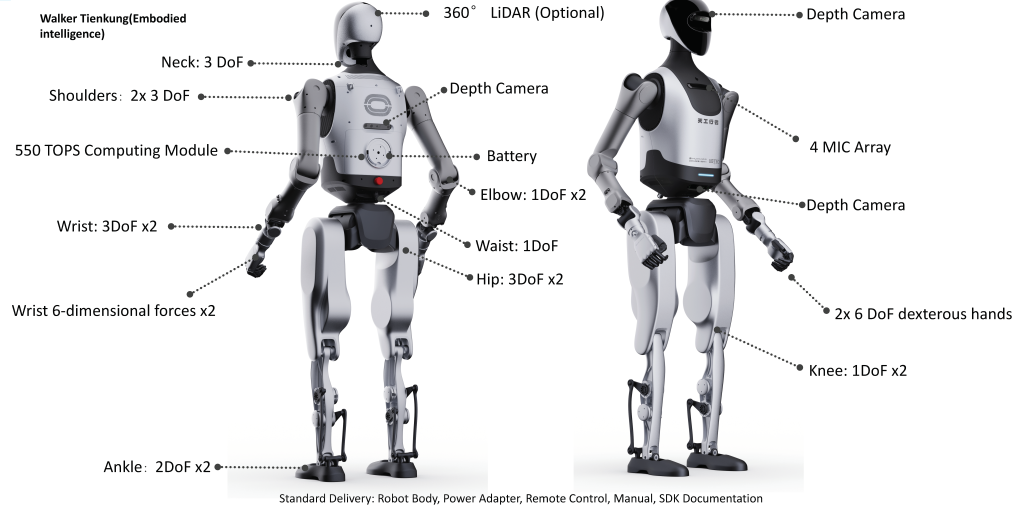
Product Introduction-Body Structure
{kind=link}
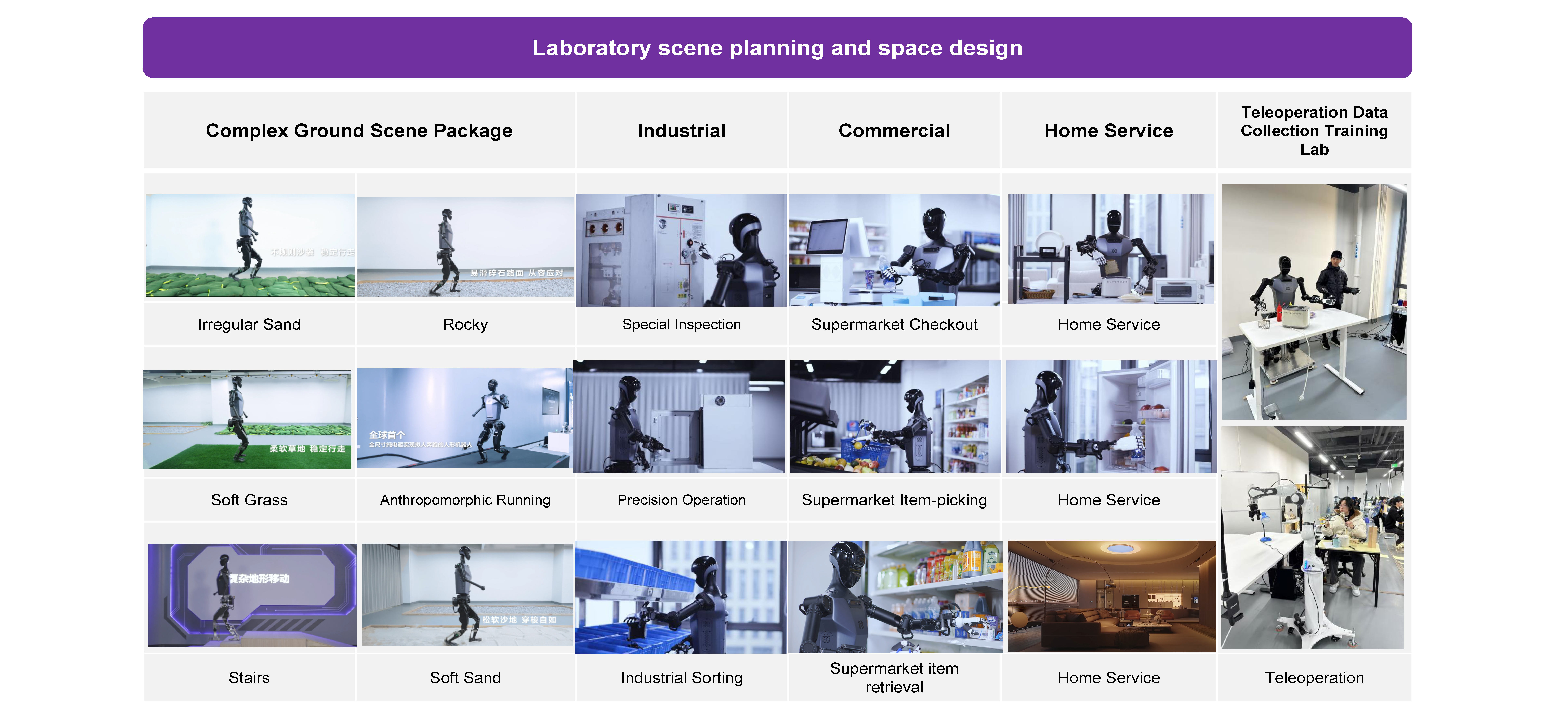
Walker Tienkung Application Scenarios
High-level humanoid robot application scenario and research direction
{kind=link}
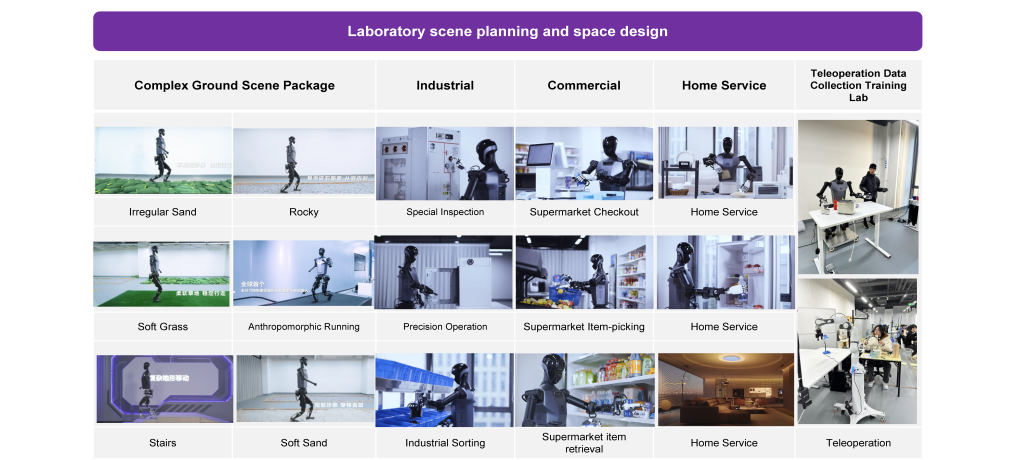
Walker Tienkung Application Scenarios
Teaching Practice and Application Innovation
{kind=link}
